Table Of Contents
The Emlid RS3 is a high-precision, multi-band GNSS receiver designed for professional applications like surveying, construction layout, and precision agriculture. What makes it stand out — especially compared to previous generations — is its tilt compensation, real-time RTK/PPK support, and compatibility with a wide range of GNSS constellations.
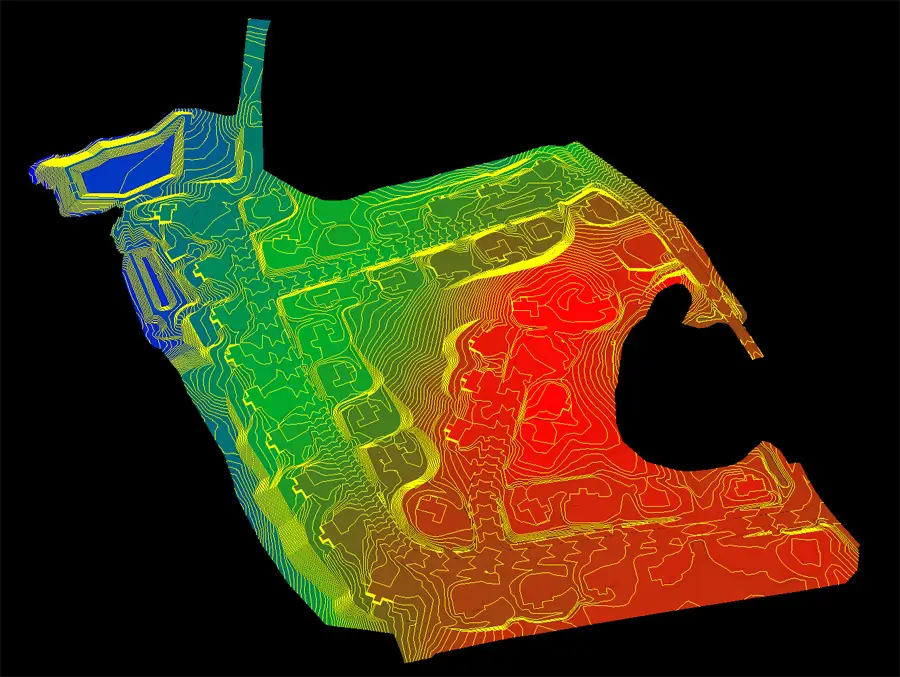
At AeroViews, we rely on the RS3 in active field environments, pairing it with platforms like the DJI Matrice 350 RTK equipped with the L2 LiDAR and the Matrice 4E for high-accuracy aerial surveys. Whether we’re establishing ground control points (GCPs) for photogrammetry or validating LiDAR accuracy in complex terrain, the RS3 has become a core part of our workflow.
That said, the most common question we get — and one that isn’t always clearly answered — is this:
Do you actually need to use a base station with the Emlid RS3 to achieve survey-grade accuracy?
In this guide, we’ll break down what a base station does, when it’s necessary, and when you might not need one — all based on real-world experience in the field.

Understanding the Emlid RS3
The Emlid RS3 GNSS receiver is engineered for field professionals who demand centimeter-level accuracy in rugged, real-world environments. At AeroViews, we use it extensively alongside the DJI Matrice 350 RTK with L2 LiDAR, and it has become a foundational tool in our drone survey workflow.
Key Features of the Emlid RS3
Multi-Band GNSS Support
The RS3 tracks all major satellite constellations — GPS, GLONASS, Galileo, BeiDou, and QZSS — across L1, L2, and L5 frequencies. This full GNSS support enables high-speed, high-accuracy positioning even in obstructed environments, as outlined in the RS3 technical specifications from Emlid.
IMU-Based Tilt Compensation
A standout feature of the RS3 is its tilt compensation system, powered by a built-in IMU. It allows survey-grade measurements even when the pole is tilted up to 60°, dramatically speeding up workflows without compromising accuracy. This is especially useful when working around structures or in rough terrain, eliminating the need to stop and level the pole each time.
RTK-Ready with Flexible Correction Input
The RS3 is fully equipped for real-time kinematic positioning, supporting correction input via NTRIP, LoRa, or a dedicated base station. This flexibility allows it to adapt to different job sites and network conditions. For those new to the concept, RTK GNSS correction allows for near-instant centimeter-level positioning by referencing a known fixed location.
Survey-Grade Accuracy in the Field
With a stable correction link, the RS3 regularly delivers horizontal accuracy under 1.5 cm — performance we’ve confirmed on-site when verifying LiDAR ground truthing. It’s reliable enough to support everything from cut-and-fill calculations to high-detail cadastral work.
Emlid RS3 vs. Comparable GNSS Receivers
| Feature | Emlid RS3 | Emlid RS2+ | Trimble R12i (for reference) |
|---|---|---|---|
| GNSS Support | GPS, GLONASS, Galileo, BeiDou (L1/L2/L5) | GPS, GLONASS, Galileo, BeiDou (L1/L2) | Full constellation, multi-band |
| Tilt Compensation | IMU-based (up to 60°) | None | Advanced IMU |
| RTK/PPK Support | RTK, PPK, NTRIP, LoRa | RTK, PPK, NTRIP, LoRa | RTK, PPK, VRS |
| Horizontal Accuracy (RTK) | ~1–1.5 cm | ~1.5–2 cm | <1 cm |
| Weight & Portability | 950g | 950g | 1.2kg+ |
| Price Range (USD) | ~$2,800 | ~$1,900 | $8,000+ |
This chart shows how the RS3 stacks up against both its predecessor and a premium-tier GNSS solution. For most aerial survey and LiDAR workflows, the RS3 offers a strong balance of cost, precision, and deployment speed — making it one of the most field-ready receivers available today.

What Is a Base Station in GNSS?
In GNSS workflows, a base station is a stationary receiver placed over a precisely known location. Its job is to continuously receive satellite data and broadcast correction signals to rover units — like the Emlid RS3 — operating in the field.
The primary purpose of a base station is to improve the positional accuracy of those rovers by acting as a fixed point of reference.
Think of it like a friend standing in one spot holding a map, helping you stay oriented as you move around. No matter where you go, they’re always giving you real-time updates on where you are relative to them.
How Base Stations Enable RTK Corrections
The RS3 — like other high-precision GNSS rovers — uses a method called real-time kinematic (RTK) positioning. RTK allows the receiver to narrow down its position from a range of meters to just a couple centimeters. But to make that possible, it needs help from a base station.
Here’s how it works:
- Both the base station and the rover receive the same satellite signals.
- Since the base station knows its exact location, it can measure the errors in the satellite data and send correction messages to the rover.
- The rover then uses that correction data to adjust its own position — in real time.
Imagine you’re trying to measure the exact location of a tree using a tape measure — but instead of one end of the tape being fixed, it’s constantly shifting. The base station is like someone holding their end of the tape perfectly still, giving you a stable reference point so your measurements are accurate.
These corrections can be sent via a radio link (like Emlid’s LoRa system) or through a cellular network using an NTRIP service, depending on the setup.
For a more technical explanation of how baseline calculations and correction workflows operate, the Trimble RTK glossary provides a helpful deep dive.
In short: a GNSS rover without a correction source is like a tape measure without an anchor — possible to use, but not reliable for high-precision work.
Operating the Emlid RS3 Without a Base Station
One of the biggest advantages of the Emlid RS3 is its ability to deliver survey-grade accuracy even when you’re not running your own base station. In the field, this can save you time, gear setup, and simplify logistics — especially when you’re working light with a drone and rover team.
Instead of setting up your own static base, you have two reliable options: NTRIP for real-time corrections over the internet, and PPK (Post-Processed Kinematic) for accuracy after the fact.
NTRIP Services: Real-Time Corrections Without Local Hardware
NTRIP (Networked Transport of RTCM via Internet Protocol) lets your RS3 connect to a correction network over the internet. That correction data comes from a network of fixed base stations — usually run by government agencies or private networks — and allows the RS3 to maintain centimeter-level accuracy on the fly.
Think of it like borrowing the view from a neighbor’s security camera instead of installing your own. You’re using their fixed location as a reference point to improve your own accuracy — no need to bring your own setup.
In our field work at AeroViews, we regularly connect to NTRIP correction services via cellular hotspot, and as long as the coverage is solid, we get the same 1–2 cm results we’d expect from a base. Apps like ReachView 3 make it easy to manage that connection.
Popular NTRIP sources include RTK2go (a free caster), state-run networks, or paid services tied to local infrastructure projects.
Best Use Cases:
- Areas with strong LTE/cellular signal
- Jobs where setup time matters (e.g. quick LiDAR checks, small site surveys)
- Solo operators or drone pilots who want minimal gear in the field
PPK: High Accuracy Without a Real-Time Connection
PPK (Post-Processed Kinematic) is your fallback when you can’t connect to a correction source in real-time. Instead of trying to fix your position live, you log raw satellite data during the mission and clean it up later by referencing known base station data.
It’s like shooting in RAW on a DSLR instead of JPEG. You might not have perfect results straight out of the field — but you’ve captured everything you need to dial in sub-centimeter accuracy later in post.
With the RS3, you simply:
- Log your GNSS data during your mission.
- Download RINEX files from a public base station near your job site.
- Run both through software like Emlid Studio to correct your rover’s positions.
This is the exact method we’ve used when flying the Matrice 350 RTK in rural areas where cellular coverage is spotty. We still get tight alignment between our L2 LiDAR outputs and PPK-adjusted GCPs, without ever broadcasting live corrections in the field.
Great public RINEX sources include national CORS networks and open data portals like UNAVCO.
Best Use Cases:
- Remote or mountainous areas with no cell service
- Multi-day field campaigns where simplicity is key
- Accuracy-critical deliverables (e.g. photogrammetry control, QA on LiDAR)
NTRIP vs. PPK: Which Correction Method Is Right for You?
| Feature / Factor | NTRIP (Real-Time) | PPK (Post-Processing) |
|---|---|---|
| Requires Internet in Field | Yes – Cellular connection or hotspot | No – Can be fully offline |
| Needs Base Station Setup | No – Uses external correction network (e.g. CORS) | No – Uses public RINEX data after fieldwork |
| Accuracy | ~1–2 cm (live) | ~1–1.5 cm (after processing) |
| Equipment Required | RS3 with mobile hotspot or SIM | RS3 only (logging raw data) |
| Workflow Speed | Immediate field accuracy | Slower – accuracy achieved after post-processing |
| Best For | Jobs with LTE coverage, fast turnaround | Remote sites, mission-critical precision, batch projects |
| Software Tools | ReachView 3, Emlid Flow, NTRIP services | Emlid Studio, RTKLib, public RINEX databases |
| Typical Use Case | Urban surveying, construction layout, drone GCP collection | LiDAR accuracy checks, long-range flights, photogrammetry QA |
When Is a Personal Base Station Recommended?
While the Emlid RS3 can operate independently using NTRIP or PPK workflows, there are still plenty of real-world situations where running your own base station is not just helpful — it’s essential.
If you’re working in connectivity dead zones, or you need full control over your correction source, setting up a base station is the most reliable way to ensure repeatable, survey-grade accuracy.
Remote Locations: When Internet Isn’t an Option
In remote areas — like agricultural fields, mountain sites, or open-pit mines — it’s common to find zero cellular service and no nearby CORS stations. That’s when a personal base station becomes your best asset.
Think of it like bringing your own weather station to a job site. You’re not relying on someone else’s data — you’re generating your own corrections right on site.
At AeroViews, we’ve deployed RS3 base stations on ranchland and ridge-top projects where NTRIP was simply off the table. Paired with a Matrice 350 RTK, this gives us a consistent correction source for both aerial and rover work, even when fully off-grid.
Highest Accuracy Projects: Full Control Over Correction Data
Even in areas with NTRIP coverage, having your own base gives you more control over the correction environment, which is crucial when you’re:
- Tying into a known benchmark or local coordinate system
- Running multi-day projects where consistency matters
- Validating LiDAR or photogrammetry datasets that require tight control tolerances
When you’re handling QA or client-facing deliverables, the base station removes unknowns from your correction chain. It ensures your entire dataset is tied to a single, known reference point — especially important when accuracy targets are tighter than 1.5 cm.
How to Set Up the Emlid RS3 as a Base Station
The RS3 makes it surprisingly simple to function as a static base — either broadcasting over LoRa radio, or logging static observation data for PPK.
Here’s a basic setup flow:
- Site Selection:
Place the RS3 on a tripod or fixed mount over a stable, known point. Avoid metal surfaces, obstructions, or reflective materials nearby.
Tip: The higher and more open the sky view, the better your satellite geometry. - Enable Base Mode:
In the ReachView 3 app, configure the RS3 to act as a base:- Input your known point coordinates, or average-in for 10–15 minutes
- Set the output format (RTCM3) and broadcast method (LoRa or TCP)
- Configure the Rover:
On your second RS3 (or your drone), set the rover to receive corrections from the base — either via LoRa radio, or through a direct network connection. - Monitor the Link:
Make sure your baseline distance (rover-to-base) stays within reliable range — generally 5–10 km for LoRa, depending on terrain.
For a full walk-through, Emlid provides clear documentation on setting up RS3 as a base.
Emlid RS3 Base Station Field Setup
This diagram illustrates the RS3 operating as a base station, broadcasting correction data to a rover (pole or drone) via LoRa or NTRIP. The rover uses these corrections to output precise, survey-grade data.
Addressing Common Questions
As more professionals adopt the Emlid RS3 for drone surveying, construction layout, and precision agriculture, a few common questions come up again and again. Here are the key ones we get in the field — along with straight answers based on real-world use.
Can the Emlid RS3 function as both a base and a rover?
Yes, the RS3 is designed to be highly versatile. It can operate as either a base station or a rover, depending on your setup needs.
At AeroViews, we regularly reconfigure the RS3 depending on the job site — for example, using one unit as a base for a LiDAR flight with the Matrice 350 RTK, and another on the ground collecting check shots as a rover.
Switching modes is straightforward using the Emlid Flow app. Just choose whether you want to broadcast corrections (Base Mode) or receive them (Rover Mode), and configure accordingly.
How do I set up the Emlid RS3 as a base station?
Setting up the RS3 as a base station is quick and field-friendly:
- Choose a stable, known point: Ideally on a benchmark, survey nail, or rebar cap. If none is available, use the “Average Position” method for ~10–15 minutes.
- Mount the RS3 securely: A tripod or fixed mount with an unobstructed sky view is ideal.
- Open the Emlid Flow app: Navigate to Base Mode, enter your coordinates, and select the output format (typically RTCM3).
- Start broadcasting corrections: Via LoRa radio or over a local network if using NTRIP.
Pro Tip: Always double-check antenna height settings and ensure you’re logging raw data if you plan to use PPK as a backup.
For a detailed walkthrough, see Emlid’s guide to base-rover configuration.
What are the benefits of using NTRIP services with the Emlid RS3?
Using NTRIP with the RS3 lets you skip the local base station entirely by tapping into an existing correction network over the internet.
This setup is ideal for:
- Quick deployment without extra hardware
- Jobs in urban or suburban areas with reliable LTE
- Solo drone operators who want to keep their gear load light
With a stable internet connection, NTRIP corrections typically deliver 1–2 cm accuracy in real-time. It’s perfect for setting aerial GCPs, utility corridor mapping, or construction QA.
That said, NTRIP does depend on network availability and local CORS coverage. If you’re headed into a remote or mountainous site, consider PPK or bringing your own base station as a fallback.
What are the benefits of using an Emlid Caster with your surveying equipment?
The Emlid Caster offers significant benefits for surveying equipment by providing reliable real-time kinematic (RTK) corrections through the internet, enhancing the accuracy of GNSS devices. It serves as a simple and efficient solution for remote data transmission, allowing surveyors to improve positioning accuracy without the need for complex setups. This technology is especially useful for precise and robust surveying tasks, where high accuracy is crucial.
How does the Reach RS3 improve surveying precision and efficiency?
The Reach RS3 improves surveying precision and efficiency by delivering high-accuracy GNSS positioning with multi-band support and robust RTK processing capabilities. Designed for seamless integration with modern surveying workflows, it features advanced tracking and reliable performance even in challenging conditions. The Reach RS3 enhances data collection efficiency, making it an ideal choice for professional applications that require detailed and accurate geospatial information.
Why is an LTE modem important for remote surveying tasks?
An LTE modem is crucial for remote surveying tasks as it enables continuous internet connectivity, facilitating real-time data transmission and communication between devices. This ensures that surveyors can access and transmit high-accuracy positioning data without interruption, even in areas with limited connectivity infrastructure. The use of an LTE modem enhances operational efficiency and ensures that critical data is received and processed promptly, crucial for remote or difficult-to-access surveying locations.
How does local NTRIP enhance relative accuracy in surveying?
Local NTRIP (Networked Transport of RTCM via Internet Protocol) enhances relative accuracy in surveying by providing precise correction data over the internet, which is used to improve the positioning calculations of GNSS receivers. This technology allows surveyors to achieve higher accuracy levels in real-time by utilizing a network of reference stations. Implementing local NTRIP can drastically enhance the quality of data collected, making it worth incorporating into professional surveying practices.
What configuration steps are necessary for setting up NTRIP services on a phone?
Setting up NTRIP services on a phone involves several configuration steps to ensure accurate and efficient data reception. First, users need to download a compatible NTRIP client app from their browser, then configure the settings by entering details such as the local NTRIP caster URL, port number, and mount point credentials. Learning the configuration process is crucial for people requiring seamless data integration into their GNSS equipment for improved survey outcomes.
Is it worth using a phone-based configuration for accessing NTRIP services?
Using a phone-based configuration for accessing NTRIP services is worth considering for its convenience and portability. This setup allows surveyors to achieve similar levels of relative accuracy compared to traditional methods without the need for additional hardware. With easy access via a browser or dedicated app and the ability to receive real-time correction data on-site, this approach provides a practical solution for enhancing the accuracy of surveying tasks.